| �Z�p�̐i���@���e�ҁF�m���m ���e���F2004/12/23(Thu) 18:29 No.1831 | |
|
�O�H�̂g�o�߂Ă���ƁA�Z���T���X���[�^�[�h���C�u������܂����B�i�}�O�l�b�g���[�^�h���C�u�j
http://www.nagoya.melco.co.jp/ipm/details/index_j.htm
�h�}�O�l�b�g���[�^�h���C�u�Ƃ́AIPM���[�^���p�̃h���C�u���j�b�g�ŋ쓮������̂ł��B
�Z���T(���x���o��)�Ȃ���IPM���[�^���쓮�\�ŁA�n���g���N150%(�ᑬ�V���[�Y)���o�͉\�ł��B�h
�������ł��B
2,000r/min MD-AX520-��K MM-CF��2(B,C,K)
7,200r/min MD-CX522-��K MM-BF��7(C,K)
10,000r/min MD-CX522-��K-A0 MM-BF��AC(K)
�l�i�͍������E�E
|
| Re: �Z�p�̐i���@�m���m - 2005/01/07(Fri) 20:46 No.1921 | |
|
| Re: �Z�p�̐i���@�m���m - 2005/01/07(Fri) 21:23 No.1925 | |
|
|
 ���i����{���Ă���ƂP�T�O�O�v�Z���T���X���[�^�[�p�̂h�b���o�Ă��܂����B
���i����{���Ă���ƂP�T�O�O�v�Z���T���X���[�^�[�p�̂h�b���o�Ă��܂����B
�v���Z�X�h�b�A�n�C�T�C�h�h���C�o�A�p���[���W���[���A
�r�v�d���Ȃł��B
|
| Re: �Z�p�̐i���@mm - 2005/01/07(Fri) 21:28 No.1926 | |
|
|
 �Z���T�[�����Ńt�B�[�h�o�b�N����]�����䂪�o����IC�ł����H
�Z���T�[�����Ńt�B�[�h�o�b�N����]�����䂪�o����IC�ł����H
�O���ɕK�v�ȉ�H�����Ȃ��Ɨǂ��ł��ˁB
�������L��܂������s�i�ł����H
|
| Re: �Z�p�̐i���@�m���m - 2005/01/07(Fri) 23:05 No.1930 | |
|
|
�h�q�̏��ɂ��������Ǝv���܂��B
IRMCK203�F�o�l���[�^�[�̐����g�ɂ��Z���T���X����IC
IRMCK203�̕]���V�X�e���FIRMCS2031
•�ڍו��i�\�E��H�}�EPCB���C�A�E�g�}•���i�̃R�X�g
�i100�ăh���^1���~��j
IRMCK203�̕]���V�X�e���FIRMCS2033
•�ڍו��i�\�E��H�}�EPCB���C�A�E�g�}•���i�̃R�X�g
�i50�ăh���^5000�~���x�j
�iTB6537P�j�̏ꍇ�̓}�O�l�b�g���[�^�[�̈ʑ��͒�R�i�P���`���炢�j�ƃ_�C�I�[�h��
�M�������A�R���p���[�^�[�Ńv���Z�X�h�b�ɓ����Ƃr�v�M��������Ă���܂��B
http://www.semicon.toshiba.co.jp/td/ja/Linear_ICs/Motor_Driver_ICs/20040524_TB6537P_datasheet.pdf
http://www.semicon.toshiba.co.jp/openb2b/websearch/resultDo.jsp
�o�v�l�M���Ńp���[���R���g���[���ł��ȒP�ȃ[�l���[�^�[�ŃR���g���[���ł��܂��B
�r�v�M�����瓯���ɉ�]�������ăT�[�{��H�ɓ���܂��B
�e�u�R���|����]���A��r�M���{��]���|���o�v�l
�{���Ή�H�}������Ǝv���܂��B
���Ȃ݂ɂ`�b�T�[�{���[�^�[�̖w�ǂ͂o�l���[�^�[�ɃG���R�[�_�[���t�������ł��B
�lj��A�o�v�l�M���̓X�C�b�`���O���\�ȓ��Ń��[�^�[�ɑ��ď\���������g���ɐݒ肵�܂��B
�g�`�̓`���b�s���O�̊�ƂȂ�A250��S�̎c�莞�Ԃ̐���������܂��B�i�K��250��S�̃p���X���ォ���Ɏc���j
����́A�����d���d����ω�������̂Ɠ������ʂ�����A�쓮�d�������[�^�[�̉�]�����̊W�ʼn�]�����ω����܂��B
�����@�@���@��=�dt/�i���E�h�j�@���@�s=���E�h2
�U���@�@���@��=�P�Q�O�i��inv�|��s�j/�o�@
���@�s=���E�i�u�^��inv�j2�E��s
�SMHz�̐����̏ꍇ�A��THz�̎n�����g���ɂȂ�܂��B
|
| Re: �Z�p�̐i���@�m���m - 2005/01/08(Sat) 11:45 No.1934 | |
|
|
�o����Ύ����̒Z���c�b���[�^�[�ł͂Ȃ��āA�`�b�T�[�{���[�^�[�A�o�l���[�^�[�Z���T���X�h���C�u�ł��ˁB
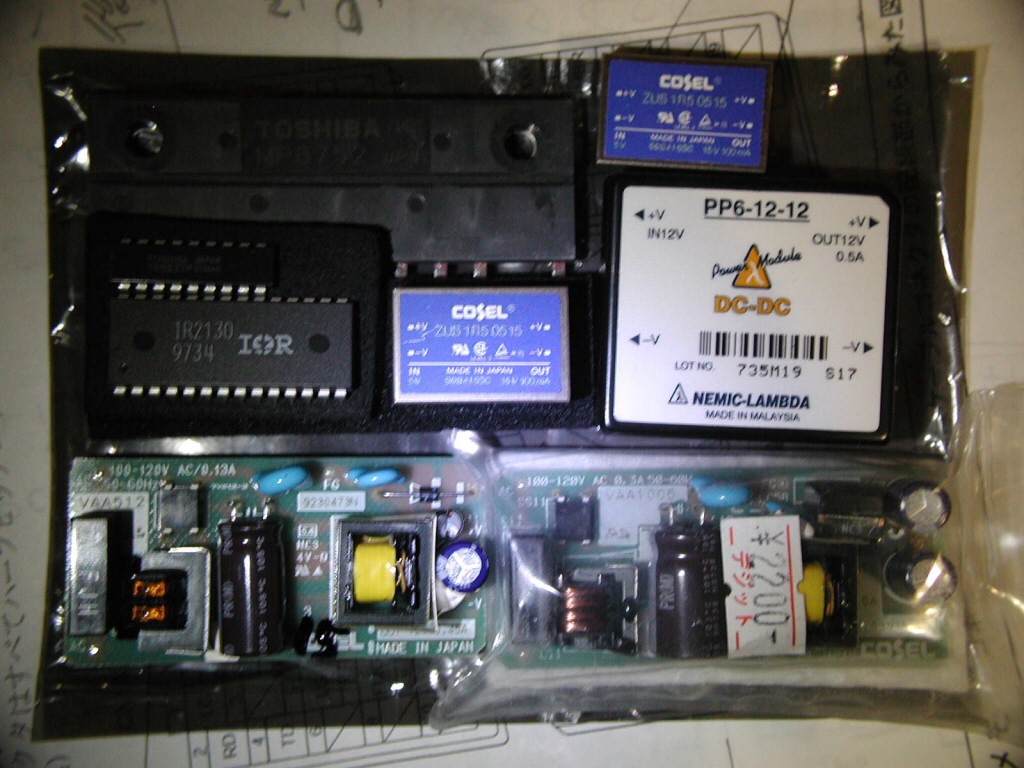
�T�[�L�b�g���[�J�[�̒��ɉ�H�}������܂����B
�R���g���[���[�A�n�C�T�C�h�h���C�o�A�p���[���W���[���A�|�W�V�����Z���V���O�A�`���[�W�|���v�B
�p���X�d���ϊ��A�����\�Ǐ]�A���v�B
�p���X���C�Y���W�����[�^�[�B
�������A�p�[�c���C�u�����[�����Ă��āiHDD�̈ړ����ɂȂ������j
��H�̐ڑ��_���Ȃ����ߖ��ݑ��ɂȂ镔��������܂��B
�i���̎��_�̋L���ɖ߂�Ȃ��j
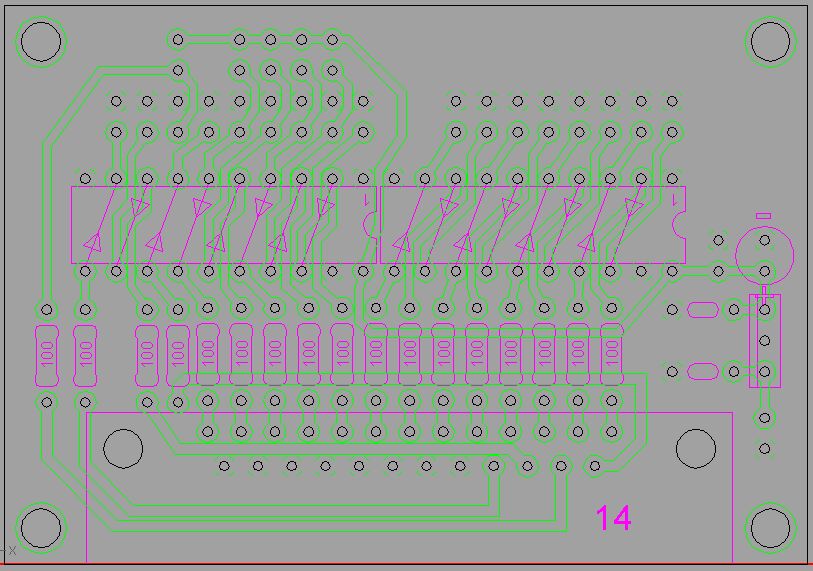
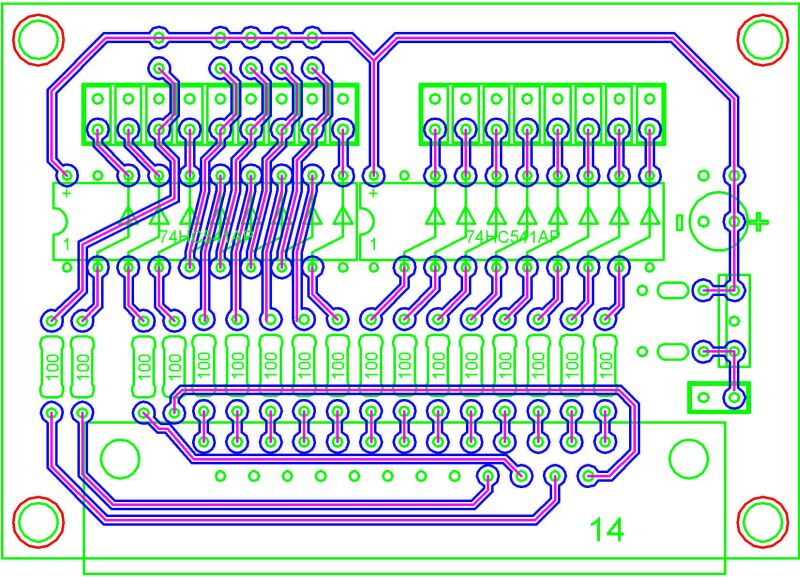
�g���b�N�X���[�J�[�̒��ɂR���̃p�^�[���}������܂����B
���m�ȉ�H�A��̔z�u���v���o���Ȃ����߁A�ǂꂪ�ŏI������܂���B��������ŗǂ���Β��܂��B
���̌f���ɕ����̉摜���f�ڂ��邱�Ƃ͏o���܂����H�B
http://jp.y42.photos.yahoo.co.jp/bc/nonnno10gou/lst?&.dir=/DCINV&.src=ph&.view=t&.last=1
|
| Re: �Z�p�̐i���@�m���m - 2005/01/08(Sat) 17:27 No.1944 | |
|
| Re: �Z�p�̐i���@hirorin - 2005/01/09(Sun) 20:16 No.1953 | |
|
|
�m���m����
���̃T�C�g�i�d�l�b�j�ɂ́A�k�h�m�t�w�x�[�X�̂b�m�b�����L��܂���B�\�[�X���ł����̊��R���p�C����������̂��ʓ|�Ȃ̂Ƃl�������P�ŕK�v�ȋ@�\�͖������Ă�̂ŁA�l�������Q�͂l�������P�ɗL�����X�N���[���o�[���������Ȃ����̂��c�O�ł��B
��́A��肽�����̓X�s���h���̑��x����ł��B
����́A�l�������ɃX�s���h������̃p���X���o����̂ł�����e�^�u�ϊ����ē����������Ǝv���Ă܂��B
�ȒP�ȉ�H�L��܂����H
���Ƃ��O�|�T�u�̒����d���ɂ������̂ł����A
�Â�X�s���h���ɃG���R�[�_��t���ăp���X�t�B�[�h�o�b�N���ĉ�]������o������ꂵ���ł��ˁB
�o�v�l���o����̂ł������葬�x�͓����܂���ł����B
|
| Re: �Z�p�̐i���@�m���m - 2005/01/09(Sun) 20:35 No.1955 | |
|
|
�l�������ɃX�s���h������̃p���X�͋ϓ��ȊԊu�̃p���X�ł����H
���邢�͊�N���b�N���Ԉ������p���X�ł����H
���̏ꍇ�e�u�ϊ�������Ɠd�����h���̂ł����A
�Q�d�ϕ����̃t�C���^�[��ʂ��ƕ��R�ʼn����̗ǂ��M�����o���܂��B
���͂��̉�H���������̂ł����A�T�[�L�b�g���[�J�[�̐}�ʂ����Ă��āA�ڑ���������Ă��܂��B
�ǂ���e�u�ƃt�C���^�[�̉�ꂽ��H���ڂ��Ă݂܂��傤���H
�i�啪�O�Ȃ̂Ŏv���o���܂���ANo.1934�̉�H�p�^�[���}������܂��A
��H�}�N���������ĖႦ������炭�߂�Ǝv���܂��j
�o�v�l���o���Ă�������肪���邩���m��܂���B
|
| Re: �Z�p�̐i���@�m���m - 2005/01/09(Sun) 20:47 No.1956 | |
|
|
������A�R�R���T�[�`�Ɖ]�����[�J�[�������āi���͒m��Ȃ��j
�����̉�]�v�̓p���X�̊Ԋu�ŕϊ��i�s�|�u�j���Ă���̂ŕω��ɂ͋}���ɔ������܂��B
�i�h�ꂪ����ꍇ�̓J�E���^��h��T�C�N���ɍ��킹��ƃ��W�F�N�g�o����ꍇ������܂��j
�܂��A���ɒx���p���X�ł��\�����Ēl���o���܂��B
�i�K�����������Ă���Ƃ͌���܂���B�j
��]���̃t�C�[�h�o�b�N����ɂ悭�g���܂����B
|
| Re: �Z�p�̐i���@�m���m - 2005/01/09(Sun) 21:56 No.1957 | |
|
|
�R�R���T�[�`�͗L��܂����B���`�����ł��ˁB
�ȑO�́A���z���炢�Ŕ����Ă��܂����B
�m���ɐ��\�͂悢�̂ł����A�g�����Ȃ����K�v�ł����B
��d�ϕ��t�C���^�[�͌����͈Ⴄ�̂ł����A���萫�͔��Q�ł��B
�������b�q�̒����͕K�v�ł��B
|
| Re: �Z�p�̐i���@hirorin - 2005/01/09(Sun) 22:39 No.1958 | |
|
|
�m���m ����
�R�R���T�[�`�ł����I
���N�Z�p�c�Ƃ̏�������V���i�̐������܂����B
���̋q��łł����E�E�E�����ŋZ�p�I�Ȏ���������Ƃ��ɁA���鎿����������ƂŁA�c�Ƃ̏����̍����Ă��܂��܂����i���j
�p���X�̏�����p�̃V�X�e���ł������A��]���̍����x���Z�ł����E�E�E
�{��ł������p���X���܂����肵�Ă��܂���B
���肵������܂��B
|
| Re: �Z�p�̐i���@�m���m - 2005/01/15(Sat) 10:45 No.2000 | |
|
|
��H�̖w�ǂ��v���o���܂����B
�R���g���[���h�b�͏��R�[���h���A�ʒu���o�̐M�������ŕς��܂��A�T�u�d�����v��܂��B
�n�C�T�C�h�h���C�o�ŁA�z�b�g���ƕ����i�z�g�J�v���ł��ǂ��j
�p���[���W���[���iIGBT��MOSFET�j�Ńh���C�u�ł��B
�ʒu���o�͂R�R�X�̃R���p���[�^�ŏo�͂̓z�b�g���łT�u�d�����v��܂��A�܂���]���p���X���o�܂��B
�A�i���O�����͂o�v�l�I�V���[�^�[�Ɛݒ�Ƃe�^�u�Q�d�ϕ��^�ϊ��A�T�[�{�A�i���O���Z�ō��̕����̓R�[���h�ɂ��܂��B
�p���[���W���[���A�n�C�T�C�h�h���C�o�͓��肪���\����̂�
��Ă�����܂��B
|
|